First 2 way cross band data
qso 600 band DK6NI <> G0NBD
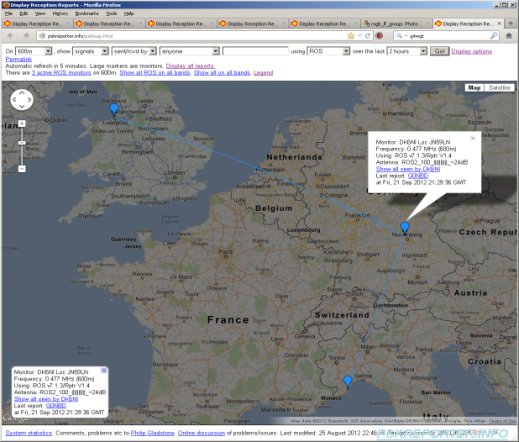
G0NBD Tx 501 KHz Rx 476 KHz
After many years of one way
QSL's , finally the first two
way data qso
Using ROS-MF-2 at
-25 dB s/n system limit in deep qsb ,
calls etc exchanged using MF-2 mode at 2100 gmt
TX2: 20:54 CQ De G0NBD QSX 476 k
<STOP>
RX2: 20:58 @ 11.7 Hz: CQ de DK6NI in JN59ln <CRC-OK> -21 dB
657 miles @ 108 0.477 Mhz
TX2: 20:59 Report: DK6NI de G0NBD IO83lk S/N:
-21 dB, Marge: +4 dB [email protected] (BRM) <STOP>
RX2: 21:03 @ 13.4 Hz: G0NDB de DK6NI pse k \«tit aia· i®
TX2: 21:12 DK6NI de G0NBD S/N: -25 dB,+0 dB qsb
:( qso on 500 at last !! btu k <STOP>
RX2: 21:15 @ 15.1 Hz: G0NDB DE DK6NI TNX GRAHAM FOR
QSO 73 GB l$Ò Fr0eeo hZfFnQf0 DCa- a©× <CANCEL> -24 dB